

国家基金创新研究群体

校长黄如为东南大学第39次南极考察队员送行
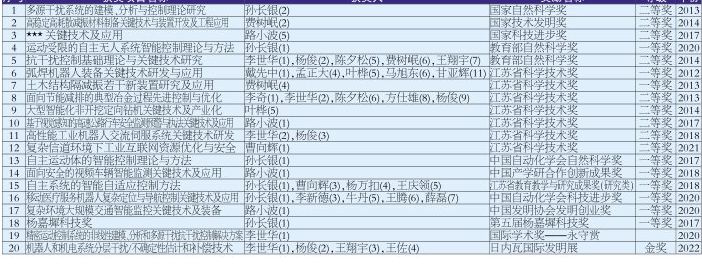
自动化学院近十年重要科研获奖情况
自1962年自动控制系成立以来,自动化学院始终面向国家重大需求与经济主战场,重点在控制科学与工程等领域谋篇布局,集聚优势力量,打造科研团队,建设科研平台,推动学科发展。2017年与2022年,控制科学与工程一级学科连续两次入选国家“双一流”建设学科,在第四轮全国学科评估中被评为A类,在复杂系统鲁棒自适应控制、机器人智能控制、网络集群控制、极地科考装备等领域已取得具有国际水平的研究成果,牵头承担了国家自然科学基金创新研究群体项目、国家973计划重点项目、国家863计划重点项目、国家自然科学基金重点项目、国家重点研发计划项目、国家科技创新项目等一大批重大项目,取得了众多原创性基础研究及重大应用成果,有力促进了若干行业的智能化改造与数字化转型升级,获得了国家科技进步奖二等奖、国家自然科学奖二等奖、国家技术发明奖二等奖、教育部自然科学奖一等奖、中国自动化学会科技进步奖一等奖、江苏省科学技术奖一等奖、日内瓦国际发明金奖等科技奖20余个。自动化学院现为江苏省自动化学会理事长单位,建有复杂工程系统测量与控制教育部重点实验室。
复杂工程系统测量与控制教育部重点实验室
重点实验室2007年批准立项,2011年通过教育部验收,2017年通过教育部评估。现有固定研究人员81人(教授38人,副教授36人),其中,中国工程院院士1人,国家高层次专家2人,国家高层次学者3人,国家杰出青年科学基金项目获得者4人,国家教学名师1人,国家创新领军人才1人,国家青年拔尖人才2人,国家创新群体负责人1人,国家优秀青年基金项目获得者3人,国家青年人才1人,国家高层次青年学者2人,国家高层次青年专家1人,俄罗斯自然科学院院士2人,欧洲科学院院士1人。
重点实验室以国家重大需求为导向,以人才培养为中心,以科学研究为手段,聚焦机器人、人工智能、大数据等领域,重点围绕机器人系统智能控制理论与应用、自主无人系统协同控制理论与方法、网络集群协同控制与智能学习、极端环境与复杂场景下智能无人系统应用、多源信息智能感知技术与应用等方面开展研究,致力为人工智能、先进制造、智慧交通等领域发展提供理论支撑与实践指导。
重点实验室承担了国家973计划重点项目、国家863计划重点项目、国家自然科学基金重点项目、国家重点研发计划项目、国家科技创新项目等重大重点项目百余项,近五年发表高水平论文800余篇,在多个研究方向取得突破性进展,研究成果已在人工智能、先进制造、智慧交通等领域中取得广泛应用,对推动我国若干行业技术发展发挥了重要作用,获得2017年国家科技进步奖二等奖,2017年中国自动化学会自然科学奖一等奖,2017年江苏省科学技术奖二等奖,2018年江苏省教育教学与研究成果奖(研究类)一等奖,2018年江苏省科学技术奖二等奖,2019年江苏省科学技术奖二等奖,2020年教育部自然科学奖一等奖,2020年中国自动化学会科技进步奖一等奖,2020年中国发明协会发明创业奖一等奖,2021年教育部自然科学奖一等奖,2021年中国发明协会发明创业奖一等奖,2021年江苏省科学技术奖二等奖,2022年日内瓦国际发明金奖等科技奖。
国家自然科学基金创新研究群体
自主无人系统是具有自主认知和决策能力的智能系统,是网络通信、信号处理、自动控制、人工智能等领域交叉融合发展的产物,在国防军事和国民经济众多领域扮演重要角色。我国高度重视自主无人系统理论研究与技术创新,国务院于2017年7月发布了《新一代人工智能发展规划》,将其列为十个“新一代人工智能重大科技项目”之一。
“自主无人系统协同控制理论及应用”国家自然科学基金创新研究群体项目依托东南大学,自动化学院孙长银教授领衔,王庆教授、徐晓苏教授、金石教授、郑文明教授、曹向辉教授等为骨干。该项目重点围绕自主无人系统精准定位与先进导航、智能集群系统协同控制等开展基础理论和关键技术研究,服务国家中长期科技发展战略,满足智慧城市、智能制造、航空航天等领域重大需求。
创新研究群体提出动态环境不确定智能自主无人系统自适应控制方法,建立运动受限自主无人系统智能控制理论与方法体系,紧密结合自主无人系统控制理论应用,深入研究输入输出约束、环境模型未知及动态时变条件下自主无人系统控制理论与关键技术,国际学术影响重大,已成功用于机械臂、无人船舶、无人吊车等自主无人系统,在航空航天、机器人、先进制造等领域,对智能控制系统发展具有重大理论支撑与实践指导价值,获得2020年教育部自然科学奖一等奖。
创新研究群体还致力推动医疗服务机器人技术创新与发展,引领医疗信息化、智能化,与国内知名机器人公司开展产学研合作,已有及在研的医疗服务机器人包括自动配送机器人、服务机器人、导诊服务机器人、物流机器人、毒麻药品管控机器人、消毒机器人等,新技术逐步得到产业化应用,医疗服务机器人运行控制平稳性、可靠性显著提高,已在全国多家单位部署使用,获得2020年中国自动化学会科技进步奖一等奖。
东南大学极地科考支撑技术研究所
习近平总书记指出,南极科学考察意义重大,是造福人类的崇高事业。南极内陆是开展大气科学、空间物理、天文学观测等科学考察任务的理想地点,有极为重要的科学价值和战略意义。东南大学依托“控制科学与工程”等双一流学科,多学科交叉融合,组建了极地科考支撑技术研究所。2009年开始,重点围绕极寒、高海拔、低气压、缺氧等极端环境下极地科学考察支撑保障领域重大需求,突破极端环境无人值守能源供应、科考装备智能控制与优化、科考观测站无人自主运行等科技难题,为我国“认识南极、保护南极、利用南极”南极战略提供科技支撑与智力保障。
经过十余年持续研发,已成功研制南极无人值守能源系统,解决了南极内陆地区自动监测与控制、远程遥测与遥控、海量数据存储、电源保障和环境控制等关键技术,已具备自主设计和研发能力。研究所先后派出5名科研人员,参与了我国第27次(魏海坤)、第35次(葛健)、第36次(方仕雄、刘西陲、吴昌德)和第39次(张侃健、葛健)南极科考任务,奔赴中国南极昆仑站和泰山站,进行设备调试与现场维护,圆满完成了我国南极科考重要保障任务。
研究所参与了“中国南极昆仑站天文台”国家重大科技基础设施建设项目,负责完成了“无人电厂”部分方案编制,建立了低温低气压试验测试等实验环境,为南极昆仑站天文台能源保障提供可行性论证。研究所还积极承担了国家重点研发计划项目课题、国家自然科学基金重点项目、上海市“科技创新行动计划”社会发展科技攻关项目等南极科考支撑技术研究课题十余项,与中国极地研究中心、紫金山天文台等南极科考研究单位建立了紧密合作关系,逐步发展为我国极地科考支撑技术研究和人才培养的重要基地,努力为国家战略服务。
机器人系统智能控制科研团队
该团队聚焦先进制造、智能建造等领域重大产业需求,充分继承并发扬本学科在复杂系统鲁棒自适应控制、机器人感知与智能控制等领域长期积累与传统优势,建有智能机器人实验室、机电系统控制实验室等科研平台,承担国家973计划重点项目、国家863计划重点项目、国家重点研发计划项目、国家自然科学基金重点项目等一批重大项目,在机器人环境感知、机器人运动学与动力学建模分析、路径规划、康复机器人、交流伺服驱动系统、机器人分布式控制系统、机器人智能控制等方面开展理论与应用研究,特别是欠驱动机器人智能控制、机器人抗干扰控制、机电系统运动控制、多机器人分布式优化控制、康复机器人智能控制等方面,基础理论与关键技术研究取得突破,填补高运动性能机器人系统、高性能交流伺服驱动系统、机器人抗干扰控制、机器人感知建模与智能控制等领域技术空白,实现国产替代,已取得具有国际水平的研究成果。获得国家科技进步奖二等奖2项,国家技术发明奖二等奖1项,教育部自然科学奖二等奖1项,江苏省科学技术奖一等奖2项,其他省部级科技奖一等奖5项,江苏省科学技术奖二等奖4项,国际学术奖永守赏1项,日内瓦国际发明金奖1项等科技奖。
智能机器人实验室现有教师10人,其中国家教学名师1人,国家高层次人才1人,国家杰青1人。近十年完成国家级课题和省部级重点项目40余项,成功研发复杂工况机器人自主感知与作业控制关键技术,在机器人控制系统核心零部件、智能感知与编程、多机协作控制与人机共融、多工艺复杂作业控制与系统集成等方面攻关卡脖子技术,取得一批国内领先的研究成果,解决了传统机器人控制方法复杂工况适应能力差等痛点问题,突破了小批量、多品种、非标准制造过程技术瓶颈,授权发明专利百余项,数十项关键技术在船舶、冶金、电力、集成电路、工程机械等行业工程化或产业化,促进行业智能化转型升级。
机电系统控制实验室现有教师10人,其中国家杰青1人,IEEEFellow2人,IETFellow3人,国家高层次青年人才2人,江苏省优青1人,江苏省333第二层次人才1人、第三层次1人,洪堡学者1人,江苏高校青蓝工程优秀青年骨干教师1人,江苏省科协青年科技托举人才3人。近十年完成国家级课题和省部级重点项目30余项,重点围绕机电系统和自主无人系统建模、分析、控制开展理论与应用研究,发表高水平论文200余篇,其中ESI高被引论文20余篇,国际著名数据库GoogleScholar论文引用超过24000次,取得具有国际水平的研究成果,已在机器人、智能制造、港口运输等行业广泛应用。
(供稿人:金立左 王颖 刘剑 甘亚辉 王翔宇)
+